飞特2020年新品STS3215磁编码360°串口总线舵机评测
2020年4月6日,深圳飞特模型有限公司发布了2020年新款磁编码版本的TTL串口总线舵机。这款舵机是基于SCS215电位器版本开发的更高性能的磁编码版本,不仅具备了飞特SM高端系列的高性价比功能,又具备了SCS系列的低价,可以说是在舵机行业面向的教育领域市场里极具竞争力的一款产品了。[敏感词]我们来评测一下这款舵机的基本参数,结构和电控上的特性。
型号:STS3215
产品名称:7.4V 19KG.CM塑料壳金属齿磁编码双轴TTL串型舵机
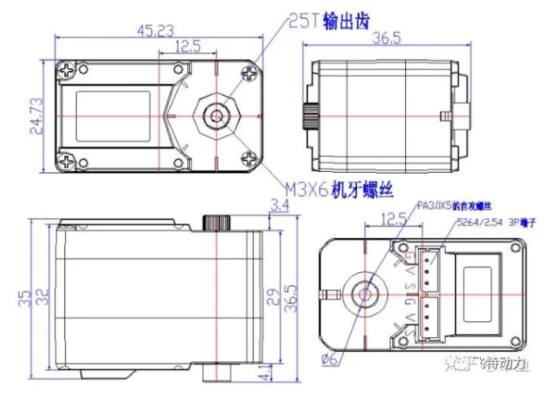
外观尺寸:45.2X24.7X35mm(详见图纸)
堵转扭矩:19.5kg.cm@7.4V
堵转速度:52RPM@7.4V
反馈:负载/位置/速度/电压/电流/温度
电子保护:过热/过流/过压/过载保护
结构特点:
外壳采用强度更高的工程塑胶外壳,优化中心点准距,整体结构更加紧凑, 舵机齿轮采用1:345的铜齿组合,扭矩更大;在同扭力条件下,较标准款舵机的尺寸,会显得更加矮身(5mm),机身采用双轴结构设计,圆衬立体的结构特性,配合金属主副舵盘和双出线的布线方式,适合在四足机器人、蛇形机器人、桌面机器人、人形机器人、机械臂中应用。
电控功能:
一、具备加速度启动停止功能:可设定速度和加速度值,运动效果更加柔和。
二、高精度,360度[敏感词]位置4096位精度,[敏感词]位置解析0.088度,如控制90度,即输入4096/360*90=1024,如控制180度,即输入4096/360*180=2048,以此推算。
三、具备四种工作模式切换(模式0位置伺服,模式1速度闭环,模式2速度开环,模式3步进伺服)。
1、模式0:位置模式,默认此模式。在该模式下可以实现360度[敏感词]角度控制。支持加速度运动。
2、模式1:速度闭环,在编程界面下,运行模式设定为1,切换至速度闭环模式,在速度栏下输入相应的速度即可运行。
3、模式2:速度开环,在编程界面下,运行模式设定为2,切换至速度开环模式,在时间栏下输入相应的时间即可运行。
4、模式3:步进模式,在编程界面下,[敏感词]/小角度限制设置为0,运行模式设定3,切换至步进模式,在位置栏输入位置即可朝目标位置步进运动,再次单击位置,可继续朝同一个方向进行步进运动。
四、多圈模式,360度[敏感词]控制与反馈,[敏感词]精度下可以正负7圈[敏感词]位置控制,但掉电圈数不保存,只保留[敏感词]位置反馈值。
五、一键校准,360度角度任意位置安装,(40号(十进制)地址输入128(十进制))一键较正当前位置为中位(2048(十进制))。
六、TTL通讯电平,半双工异步通讯,总线协议支持调整读写参数,增加同步读功能(发一条指令,可依次接收来自总线上的每个舵机的回读指令。)
七、多种保护,(过载,过流,过压,过热,可设置开关,改变条件参数)
1、过载保护:通过位置检测方式,起始位置到达目标位置的运动过程中,遇到障碍物堵转后,检测当前位置不是目标位置时,持续2S后卸力(默认堵转的20%力)。直至触发新命令,解保护。
2、过流保护:通过设定的电流值,检测当前电流是否到达设定的电流值,当到达后2S后卸力(默认扭力为0)。直至触发新命令,解保护。
3、过压保护:检测当前电压值,超过设定的电压值即报警显示过压。
4、过热保护:检测当前电机温度,超过设定的温度值即报警显示过热。
八:多种反馈:
1、负载反馈:当前控制输出驱动电机的电压占空比,满格是1000=100%的扭力输出。
2、电流反馈:当前舵机工作电流,1=6.5毫安
3、电压反馈:当前舵机工作电压,70=7V,0.1V
4、温度反馈:当前舵机内部工作温度(测量温度)。
5、速度反馈:反馈当前电机转动的速度,单位时间(每秒)内运动的步数。
九、开放PID参数,便于修改运动效果,出厂已做优化,不建议修改。
像这样的一款高性价比的舵机在市场上很难找到与之媲美的一款产品,国内零售价99元人民币(未税),国外售价15美金,价格上是相当诱人的,性能上还具备了SM高端系列的几乎所有功能特性。飞特专注舵机研发已近十载,根深的技术一直领先于行业前列。这款产品的面市,对To B市场的产品革新,优化升级又是一场研发上的较量,考验工程师如何利用更好的零配件革新优化产品,这必定是未开的产品开发的一个趋势,也是市场对产品更新迭代的一个非常重要的资源整合方式。



- 下一条: “2020 我们再出发”飞特年度盛典

